
799780百万文字论坛-798790百万文字七图论坛-799780百万文字论坛新粤彩-780790百万文字论坛红字-500505百万文字论坛转载各坛如果您正在做下面一件或幾件事,那么您可能需要機器人離線編程仿真軟件
給老板或用戶呈報機器人工作站設計 機器人編程,尤其是采用示教編程方式比較復雜、困難 機器人選型 更換零件批號生產,但不愿長時間停工 正在調研離線編程軟件,但詢價后驚訝于高昂的軟件售價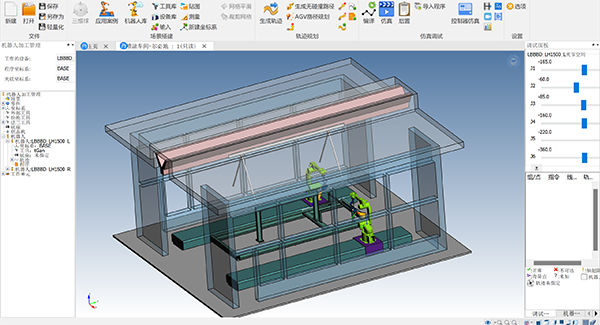
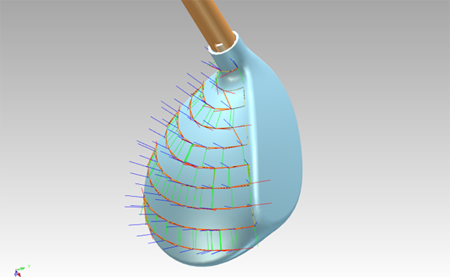
九大類生成軌跡方式,上百個軌跡參數,數十個參數化軌跡修改方式,總有一款適合您!
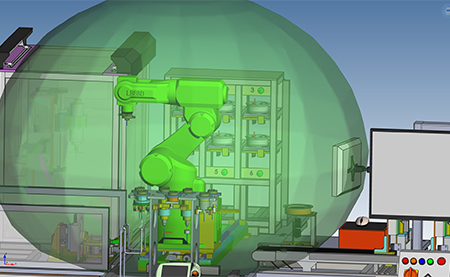
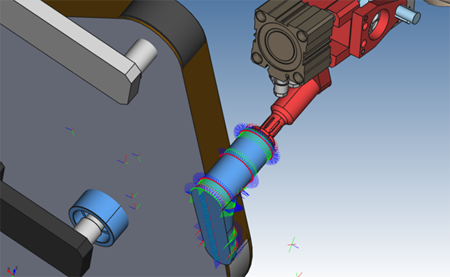
799780百万文字论坛-798790百万文字七图论坛-799780百万文字论坛新粤彩-780790百万文字论坛红字-500505百万文字论坛转载各坛軟件不僅可以計算機器人的法蘭位置的可達空間,也可以計算機器人末端執行器的可達空間,讓您的工作站設計和軌跡規劃更加真實高效。
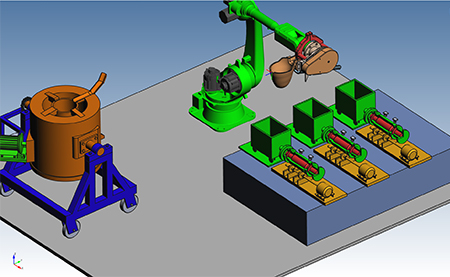
機器人工作方式常見的有以下兩種:
1. 手持工具,零件固定;
2. 手持零件,工具固定;
第二種成為外部工具,變成更復雜。PQArt提供了外部工具、變位工具、連續TCP、工件坐標系等配合使用,使手持零件不再復雜。
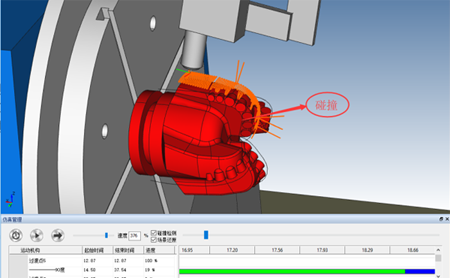
799780百万文字论坛-798790百万文字七图论坛-799780百万文字论坛新粤彩-780790百万文字论坛红字-500505百万文字论坛转载各坛仿真時,開啟碰撞檢測功能,可以模擬檢測出機器人在運動時和周邊的零部件、設施的碰撞情況,并通過高亮線和輸出碰撞信息加以提示。
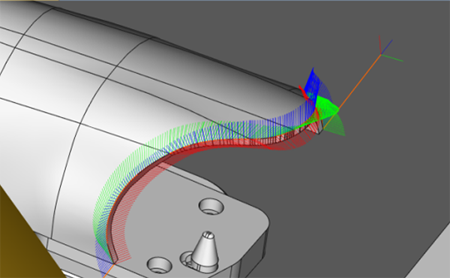
799780百万文字论坛-798790百万文字七图论坛-799780百万文字论坛新粤彩-780790百万文字论坛红字-500505百万文字论坛转载各坛可把軌跡中的奇異點、軸限位、不可達、碰撞等信息反映在界面上,通過鼠標拖動自動避讓,快速獲得理想軌跡,提高工作效率。
通過外部軸聯動的插值功能,用戶可優化外部軸位置以實現沿整個刀具路徑的平滑運動,而不需要手動修改每個機器人之間的目標位置控制點。
體驗更多功能,立即下載使用!
下載軟件

 立即下載
立即下載
